")
Sisällysluettelo:
- Vaihe 1: Teoreettinen ongelma
- Vaihe 2: Käytä Snellin lakia osoittamaan
- Vaihe 3: Käytännön kokeilumalli
- Vaihe 4: Tarvittavat materiaalit
- Vaihe 5: 3D -tulostus
- Vaihe 6: Polkujen laserleikkaus
- Vaihe 7: Puun leikkaaminen
- Vaihe 8: Reikien poraus
- Vaihe 9: Jäähdytyselementtien ja magneettien upottaminen
- Vaihe 10: Rajakytkimien kiinnittäminen
- Vaihe 11: LCD -näyttö
- Vaihe 12: Elektroniikan kytkentä
- Vaihe 13: Koodin lataaminen
- Vaihe 14: 3D -tulostusoppaat
- Vaihe 15: Tulpan ja ajoitusyksikön lisääminen
- Vaihe 16: Vapautusmekanismi
- Vaihe 17: Kokeilu
- Vaihe 18: Johtopäätös
- Kirjoittaja John Day day@howwhatproduce.com.
- Public 2024-01-30 09:01.
- Viimeksi muokattu 2025-01-23 14:41.




Brachistokronikäyrä on klassinen fysiikan tehtävä, joka johtaa nopeimman reitin kahden eri korkeudessa olevan pisteen A ja B välillä. Vaikka tämä ongelma saattaa tuntua yksinkertaiselta, se tarjoaa intuitiivisen tuloksen ja on siksi kiehtovaa katseltavaa. Tässä oppaassa opitaan teoreettisesta ongelmasta, kehitetään ratkaisu ja lopulta rakennetaan malli, joka osoittaa tämän hämmästyttävän fysiikan periaatteen ominaisuudet.
Tämä projekti on suunniteltu lukiolaisille, koska ne kattavat teoriakursseihin liittyviä käsitteitä. Tämä käytännön projekti ei ainoastaan vahvista heidän käsitystään aiheesta, vaan tarjoaa myös synteesin useista muista kehitettävistä aloista. Esimerkiksi mallin rakentamisen aikana opiskelijat oppivat optiikasta Snellin lain, tietokoneohjelmoinnin, kolmiulotteisen mallinnuksen, digitaalisen murskauksen ja puuntyöstön perustaitojen avulla. Näin koko luokka voi jakaa työn keskenään ja tehdä siitä ryhmätyötä. Tämän projektin tekemiseen tarvittava aika on noin viikko ja se voidaan sitten osoittaa luokalle tai nuoremmille oppilaille.
Ei ole parempaa tapaa oppia kuin STEMin kautta, joten jatka tekemällä oma toimiva brachistokronimalli. Jos pidät projektista, äänestä sitä luokkahuoneessa.
Vaihe 1: Teoreettinen ongelma


Brachistokroni -ongelma pyörii sellaisen käyrän löytämisessä, joka yhdistää kaksi kohtaa A ja B, jotka ovat eri korkeuksissa, joten B ei ole suoraan A: n alapuolella, joten marmorin pudottaminen yhtenäisen painovoimakentän vaikutuksesta tätä polkua pitkin saavuttaa B mahdollisimman nopeasti. Ongelman esitti Johann Bernoulli vuonna 1696.
Kun Johann Bernoulli kysyi brakistokronin ongelmasta kesäkuussa 1696 Acta Eruditorumin lukijoille, joka oli yksi ensimmäisistä tieteellisistä aikakauslehdistä Euroopan saksankielisissä maissa, hän sai vastauksia viideltä matemaatikolta: Isaac Newton, Jakob Bernoulli, Gottfried Leibniz, Ehrenfried Walther von Tschirnhaus ja Guillaume de l'Hôpital, joilla on ainutlaatuinen lähestymistapa!
Varoitus: seuraavat vaiheet sisältävät vastauksen ja paljastavat tämän nopeimman polun takana olevan kauneuden. Käytä hetki aikaa miettiä tätä ongelmaa, ehkä saatat murtaa sen aivan kuten yksi näistä viidestä neroista.
Vaihe 2: Käytä Snellin lakia osoittamaan

Yksi tapa ratkaista brachistokroni -ongelma on ratkaista ongelma piirtämällä analogioita Snellin lain kanssa. Snellin lakia käytetään kuvaamaan polkua, jota valonsäde kulkisi päästäkseen pisteestä toiseen samalla kun se siirtyy kahden eri välineen läpi käyttäen Fermatin periaatetta, jonka mukaan valonsäde kulkee aina nopeimman reitin. Tämän yhtälön muodollinen johdannainen löytyy seuraavasta linkistä.
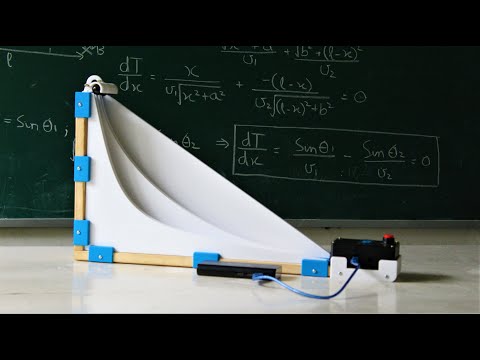
Koska vapaasti putoavaa kohdetta painovoimakentän vaikutuksen alaisena voidaan verrata muuttuvan väliaineen läpi kulkevaan valonsäteeseen, joka kerta, kun valonsäde kohtaa uuden väliaineen, säde poikkeaa hieman. Tämän poikkeaman kulma voidaan laskea Snellin lain avulla. Kun edelleen lisätään pienentävien tiheyskerrosten lisäyksiä poikkeaman valonsäteen eteen, kunnes säde saavuttaa kriittisen kulman, jossa säde yksinkertaisesti heijastuu, säteen liikerata kuvaa brakistokronikäyrää. (punainen käyrä yllä olevassa kaaviossa)
Brachistokronikäyrä on itse asiassa sykloidi, joka on käyrä, jota seuraa ympyränmuotoisen pyörän reunan piste, kun pyörä pyörii suoraa viivaa pitkin. Näin ollen, jos meidän on piirrettävä käyrä, voidaan yksinkertaisesti käyttää yllä olevaa menetelmää sen luomiseksi. Toinen käyrän ainutlaatuinen ominaisuus on, että mistä tahansa käyrän pisteestä vapautettu pallo kestää täsmälleen saman ajan päästä pohjaan. Seuraavat vaiheet kuvaavat luokkahuoneessa tehtävän kokeen tekemistä rakentamalla mallin.
Vaihe 3: Käytännön kokeilumalli

Malli koostuu laserleikkausreiteistä, jotka toimivat marmorien jäljinä. Osoittaaksemme, että brachistokronikäyrä on nopein reitti pisteestä A paikkaan B, päätimme verrata sitä kahteen muuhun polkuun. Koska melko monet ihmiset tuntuisivat intuitiivisesti, että lyhin osa on nopein, päätimme laittaa suoran kaltevuuden, joka yhdistää molemmat pisteet toiseksi poluksi. Kolmas on jyrkkä käyrä, koska tuntuisi, että äkillinen pudotus antaisi tarpeeksi nopeutta voittaa loput.
Toinen koe, jossa pallot vapautetaan eri korkeuksilta kolmella brakistokronipolulla, johtaa pallojen saavuttamiseen samanaikaisesti. Näin mallimme sisältää 3D -painettuja oppaita, jotka tarjoavat helpon vaihdettavuuden akryylipaneelien välillä, jolloin molemmat kokeet voidaan suorittaa.
Lopuksi irrotusmekanismi varmistaa, että pallot pudotetaan yhteen ja alaosassa oleva ajoitusmoduuli tallentaa ajoitukset, kun pallot saavuttavat pohjan. Tämän saavuttamiseksi olemme upottaneet kolme rajakytkintä, jotka aktivoituvat, kun pallot laukaisevat sen.
Huomaa: Tämän mallin voisi yksinkertaisesti kopioida ja tehdä pahvista tai muista helposti saatavista materiaaleista
Vaihe 4: Tarvittavat materiaalit



Tässä on osat ja tarvikkeet brachistokronikokeen toimivan mallin tekemiseksi
LAITTEISTO:
1 "mäntypuulauta - mitat; 100 x 10 cm
Neodyymimagneetti 4 - mitat; Halkaisija 1 cm ja korkeus 0,5 cm
3D-tulostuslanka- PLA tai ABS ovat kunnossa
M3 kierteinen insertti x 8 - (valinnainen)
M3 pultti x 8-2,5 cm pitkä
Puuruuvi x 3-6 cm pitkä
Puuruuvi 12 - 2,5 cm pitkä
ELEKTRONIIKKA:
Arduino Uno
Rajakytkin 4- nämä kytkimet toimivat ajoitusjärjestelmänä
Paina nappia
LCD -näyttö
Jumpwire x monta
Mallin kokonaiskustannukset olivat noin 30 $
Vaihe 5: 3D -tulostus


Useita osia, kuten irrotusmekanismi ja ohjauslaatikko, valmistettiin 3D -tulostimen avulla. Seuraava luettelo sisältää osien kokonaismäärän ja niiden tulostustiedot. Kaikki STL -tiedostot ovat yllä olevassa kansiossa, jolloin niitä voidaan tarvittaessa muuttaa.
Ohjauslaatikko x 1, täyttö 20%
Ohjain x 6, täyttö 30%
Päätepysäkki x 1, täyttö 20%
Kääntövarsi x 1, täyttö 20%
Pivot -kiinnitys x 1, täyttö 30%
Vapautuskappale x 1, täyttö 20%
Osat painettiin PLA -levyllä, koska kappaleisiin ei kohdistu erityistä jännitystä. Yhteensä tulostaminen kesti noin 40 tuntia.
Vaihe 6: Polkujen laserleikkaus

Fusion 360: lle suunnitellut eri polut vietiin.dxf-tiedostoina ja sitten laserleikattuina. Valitsimme läpinäkymättömän valkoisen akryylin, jonka paksuus oli 3 mm kaarien tekemiseksi. Sen voi tehdä jopa puusta käsityökaluilla, mutta on tärkeää varmistaa, että valittu materiaali on jäykkää, koska joustavuus voi vaikuttaa pallojen rullaamiseen.
6 x Brachistokronikäyrä
2 x jyrkkä käyrä
2 x suora käyrä
Vaihe 7: Puun leikkaaminen


Mallin runko on valmistettu puusta. Valitsimme 1 "x 4" männyn, koska meillä oli jäljellä edellisestä projektista, vaikka voidaan käyttää haluamaasi puuta. Leikkasimme pyörösahalla ja ohjaimella kaksi pituista puukappaletta:
48 cm eli polun pituus
31 cm eli korkeus
Puhdistimme karkeat reunat hiomalla sitä kevyesti kiekkohiomakoneella.
Vaihe 8: Reikien poraus



Ennen kuin ruuvaat kaksi kappaletta yhteen, merkitse puun paksuus alakappaleen toiseen päähän ja keskitä kolme yhtä kaukana olevaa reikää. Käytimme 5 mm: n terää luodaksemme pilot -reiän molemmille puukappaleille ja upotimme reiän pohjakappaleeseen, jotta ruuvin päätä voidaan ajaa tasaisesti.
Huomautus: Varo halkaisemasta pystysuoraa puukappaletta, koska se porautuu lopulliseen viljaan. Käytä myös pitkiä puuruuveja, koska on tärkeää, että kehys ei tärise ja yläosa vivun vuoksi.
Vaihe 9: Jäähdytyselementtien ja magneettien upottaminen



Koska 3D-tulostettujen osien langat kuluvat ajan myötä, päätimme upottaa jäähdytyselementit. Reiät ovat hieman alikokoisia, jotta jäähdytyselementti tarttuu paremmin muoviin. Asetimme M3-jäähdytyselementit reikien päälle ja työnsimme ne sisään juotosraudan kärjellä. Kuumuus sulaa muovin, jolloin hampaat kiilautuvat sisään. Varmista, että ne ovat pinnan tasalla ja menneet kohtisuoraan. Kierrekappaleita varten on yhteensä 8 paikkaa: 4 kannelle ja 4 Arduino Unon kiinnittämistä varten.
Ajoitusyksikön asennuksen helpottamiseksi upotimme magneetit laatikkoon, mikä helpottaa irrottamista, jos muutoksia tarvitaan. Magneettien on suunnattava samaan suuntaan ennen kuin ne työnnetään paikoilleen. S
Vaihe 10: Rajakytkimien kiinnittäminen



Kolme rajakytkintä on kiinnitetty ajoitusyksikön toiselle puolelle, joka on kohti polkuja. Siten kun pallot napsauttavat kytkimiä, voidaan määrittää, mikä pallo saavutti ensimmäisenä, ja näyttää ajoituksen nestekidenäytössä. Juotos pienillä lankakaistoilla liittimiin ja kiinnitä ne aukkoihin CA -liimalla, sillä niiden ei pitäisi löystyä jatkuvien iskujen jälkeen.
Vaihe 11: LCD -näyttö




Ajoitusyksikön kannessa on suorakulmainen aukko LCD -näytölle ja reikä "Käynnistä" -painikkeelle. Kiinnitämme näytön kuumalla liimalla, kunnes se on kannen pinnan tasalla, ja kiinnitimme punaisen napin kiinnitysmutterilla.
Vaihe 12: Elektroniikan kytkentä



Johdotus koostuu eri komponenttien liittämisestä Arduinon oikeisiin nastoihin. Asenna laatikko noudattamalla yllä olevaa kytkentäkaaviota.
Vaihe 13: Koodin lataaminen




Brachistokroniprojektin Arduino -koodi löytyy alla. Elektroniikkaosastossa on kaksi aukkoa, joista pääsee helposti käsiksi Arduinon ohjelmointiporttiin ja virtaliitäntään.
Laatikon päällä olevaa punaista painiketta käytetään ajastimen käynnistämiseen. Kun marmorit rullaavat alas käyristä ja laukaisevat alareunassa olevat rajakytkimet, ajoitukset kirjataan peräkkäin. Kun kaikki kolme palloa ovat osuneet, nestekidenäyttö näyttää tulokset vastaavien käyrien mukaisesti (yllä olevat kuvat). Kun olet havainnut tulokset, jos toinen lukema on tarpeen, päivitä ajastin painamalla pääpainiketta uudelleen ja toista sama prosessi.
Vaihe 14: 3D -tulostusoppaat




3D -tulostetuilla ohjaimilla oli 3 mm: n materiaalipohja ennen tukiseinien alkamista. Siksi, kun akryylipaneelit liu'utetaan paikalleen, paneelin ja puurungon väliin jää rako, mikä heikentää reitin vakautta.
Siksi ohjain oli upotettava 3 mm puuhun. Koska meillä ei ollut reititintä, veimme sen paikalliseen korjaamoon ja teimme sen jyrsinkoneella. Hieman hiomisen jälkeen tulosteet sopivat tiukasti ja pystyimme kiinnittämään sen puuruuvilla sivulta. Yllä on malli kuuden ohjaimen sijoittamisesta puurunkoon.
Vaihe 15: Tulpan ja ajoitusyksikön lisääminen




Koska ajoitusmoduuli oli erillinen järjestelmä, päätimme tehdä nopean asennus- ja irrotusjärjestelmän magneetteja käyttämällä. Tällä tavalla voit helposti ohjelmoida sen yksinkertaisesti ottamalla laitteen pois. Sen sijaan, että tekisimme mallin puuhun upotettavien magneettien sijainnin siirtämiseksi, annamme niiden yksinkertaisesti liittyä laatikossa oleviin magneetteihin ja asetamme sitten vähän liimaa ja asetamme laatikon puukappaleen päälle. Liimajäljet siirrettiin puuhun, jolloin voimme porata reiät nopeasti tarkkoihin kohtiin. Kiinnitä lopuksi 3D -tulostettu tulppa, ja ajoitusyksikön tulisi istua tiukasti, mutta pystyä irrottamaan kevyesti
Vaihe 16: Vapautusmekanismi



Vapautusmekanismi on yksinkertainen. Kytke C -osa tiukasti kääntövarteen mutterilla ja pultilla, jolloin niistä tulee yksi turvallinen kappale. Poraa sitten kaksi reikää pystysuoran puun keskelle ja kiinnitä teline. Liu'uta kääntöakseli ja mekanismi on valmis.
Vaihe 17: Kokeilu


Nyt kun malli on valmis, voidaan tehdä seuraavat kokeet
Koe 1
Liu'uta varovasti sisään suoran polun, brachistokronikäyrän ja jyrkän polun akryylipaneelit (tässä järjestyksessä parhaan mahdollisen vaikutuksen saavuttamiseksi). Vedä sitten salpaa ylös ja aseta kolme palloa käyrän yläosaan varmistaen, että ne ovat täysin kohdakkain toistensa kanssa. Pidä niitä tiukasti paikallaan salpa alaspäin. Anna yhden oppilaan vapauttaa pallot ja toisen painamalla punaista painiketta käynnistääksesi ajoitusjärjestelmän. Lopuksi tarkkaile, kuinka pallot vierivät polkua pitkin, ja analysoi ajoitusmoduulissa näytettyjä tuloksia. Kameran asettaminen hidastetun kuvan tallentamiseen on vieläkin jännittävämpää, koska kilpailu näkyy kuva kerrallaan.
Koe 2
Kuten edellinen kokeilulasi akryylipaneeleissa, tällä kertaa kaikkien polkujen on oltava brachistonchrone -käyrä. Pyydä oppilasta huolellisesti pitämään kolme palloa tällä korkeudella ja paina punaista painiketta, kun pallot vapautetaan. Katso hämmästyttävä hetki, kun pallot asettuvat täydellisesti ennen maaliviivaa, ja vahvista havainnot tuloksilla.
Vaihe 18: Johtopäätös

Brachistokronimallin tekeminen on käytännön tapa nähdä tieteen maagiset tavat. Kokeilujen lisäksi on hauskaa katsella ja kiehtovaa, mutta se tarjoaa myös synteesin oppimisnäkökohdista. Vaikka tämä esitys on ensisijaisesti tarkoitettu lukiolaisille sekä käytännössä että teoreettisesti, nuoremmat lapset voivat helposti ymmärtää tämän esityksen ja se voidaan esittää yksinkertaistettuna esityksenä.
Haluamme kannustaa ihmisiä tekemään asioita, olivatpa ne sitten onnistumisia tai epäonnistumisia, koska päivän päätteeksi STEM on aina hauskaa! Hyvää tekemistä!
Jätä äänestys luokkahuoneessa, jos pidit ohjeista ja jätä palautteesi kommenttiosioon.


Pääpalkinto luokkahuoneen tiedekilpailussa
Suositeltava:
DIY 37 Leds Arduino -rulettipeli: 3 vaihetta (kuvilla)
")
DIY 37 Leds Arduino Roulette Peli: Ruletti on kasinopeli, joka on nimetty ranskalaisen sanan mukaan, joka tarkoittaa pientä pyörää
Covid -suojakypärä, osa 1: johdanto Tinkercad -piireihin!: 20 vaihetta (kuvilla)
")
Covid -suojakypärä, osa 1: johdanto Tinkercad -piireihin!: Hei, ystävä! Tässä kaksiosaisessa sarjassa opimme käyttämään Tinkercadin piirejä - hauskaa, tehokasta ja opettavaista työkalua piirien toiminnasta! Yksi parhaista tavoista oppia on tehdä. Joten suunnittelemme ensin oman projektimme: th
Weasleyn sijaintikello neljällä kädellä: 11 vaihetta (kuvilla)
")
Weasleyn sijaintikello neljällä kädellä: Joten Raspberry Pi: n kanssa, joka oli pyörinyt jonkin aikaa, halusin löytää mukavan projektin, jonka avulla voisin hyödyntää sitä parhaalla mahdollisella tavalla. Löysin ppeters0502 tämän upean Instructable Build Your Own Weasley Location Clockin ja ajattelin, että
Ammattimainen sääasema käyttäen ESP8266- ja ESP32 -DIY: 9 vaihetta (kuvilla)
")
Ammattimainen sääasema käyttämällä ESP8266- ja ESP32 -DIY: LineaMeteoStazione on täydellinen sääasema, joka voidaan liittää Sensirionin ammattitunnistimiin sekä joihinkin Davis -instrumenttikomponentteihin (sademittari, tuulimittari)
Pultti - DIY -langaton latauskello (6 vaihetta): 6 vaihetta (kuvilla)
: 6 vaihetta (kuvilla)")
Pultti - DIY -langaton latausyökello (6 vaihetta): Induktiiviset lataukset (tunnetaan myös nimellä langaton lataus tai langaton lataus) on langattoman voimansiirron tyyppi. Se käyttää sähkömagneettista induktiota sähkön tuottamiseen kannettaville laitteille. Yleisin sovellus on langaton Qi -latauslaite