")
Sisällysluettelo:
- Kirjoittaja John Day day@howwhatproduce.com.
- Public 2024-01-30 09:00.
- Viimeksi muokattu 2025-01-23 14:41.



Fusion 360 -projektit »
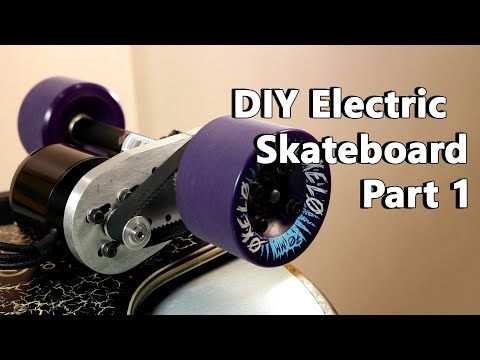
Hei, toiset luojat, tässä oppaassa näytän sinulle, kuinka tehdä DIY -sähköinen rullalauta suhteellisen pienellä budjetilla. Rakentamani lauta voi saavuttaa nopeuden noin 40 km/h (26 mph) ja ajaa noin 18 km.
Yllä on video -opas ja muutama kuva rakennuksestani. Tukekaa työtäni tilaamalla YouTube -kanavani
Lopuksi, luistele aina kykyjesi rajoissa riippumatta siitä, mitä ajat, käytä aina kypärää ja asianmukaisia suojavarusteita.
Joten kun sanotaan, aloitetaan!
Tarvikkeet
Tässä on kaikki tarvikkeet, joita tarvitset sähköisen rullalaudan rakentamiseen
Osat ja komponentit:
- Longboard, rullalauta
- Harjaa vähemmän DC -moottoria
- Tunnistettu BLDC -moottori (tämä on parempi kuin minun)
- SensorLess BLDC -moottori (halvempi)
-
ESC (nopeudensäädin)
- Anturiton ESC
- Anturinen ESC (VESC)
-
Drive Train
- Hihnapyörän versio
- Ketjupyörän versio
- Moottorin kiinnityssarja
-
Paristot
- 18650 solua
- Liposolut
- Paristokotelo
Työkalut ja tarvikkeet:
- Juotin
- Juotoslanka
- Työkalulaatikko
- Metalliviilat
- Porata
- Poranterät
- Plyers
Vaihe 1: Oikean rullalaudan tai Longboardin valitseminen


Ensimmäinen haaste oli löytää rullalauta, jota voin myöhemmin muokata sähköiseksi. Olisin voinut helposti rakentaa sen itse, mutta minulla ei ollut oikeita työkaluja siihen. Joka tapauksessa rullalautojen valinnassa on melko vähän vaihtoehtoja, kuten penniäkään, ylinopeuslauta, Longboard jne.
Paras valinta tässä oli tietysti Longboard, koska ne ovat yleensä leveämpiä ja pidempiä. Pehmeiden pyörien lisäksi ne ovat myös luotettavampia, helpompia ajaa tasapainoisemman rakenteensa ansiosta, joten ne sopivat hyvin aloittelijoille ja meillä on paljon tilaa lisätä elektroniikkaa myöhemmin, voit valita toisen tyyppisen pyörän toimii hyvin, mutta muista, mikä sopii sinulle parhaiten ja hanki sellainen.
Vaihe 2: Moottorien ja ESC: n valinta


Tästä alkaa hauska osa, Tervetuloa hauskan, kärsivällisyyden ja vaihtoehtojen maailmaan. Kyllä, vaihtoehdot. Siellä on paljon vaihtoehtoja, olivatpa ne sitten moottoreita, ESC: itä (nopeudensäädin) tai akkuja. Mutta miten rajaat mitä haluat tai et halua? Autan sinua parhaani mukaan.
Moottori: DC -moottoreita on pääasiassa kahta tyyppiä, 1) Harjattu tasavirtamoottori:
2) Harjaton tasavirtamoottori (BLDC):
Mitä etsit, on harjaton (BLDC) ulkoinen moottori, jonka kv -arvo on 170-300 ja teho 1500-3000 wattia. Ajattele siis kv -luokitustasi sen verran, kuinka paljon vääntöä levylläsi on, mitä pienempi kv, sitä suurempi vääntömomentti. Moottorini on mitoitettu 280 kv: lle ja 2500 watille, mikä on melko lihaksikas ja riittää enemmän kuin 100 kg painavalle henkilölle.
ESC: ESC on lyhenne sanoista Electronic Speed Controller, koska BLDC on bittinopeus ja käyttää nopeuden säätämiseen 3 vaihetta, joten tarvitset nopeudensäätimen. ESC on rakenteen "aivot". Se on linkki akkujen ja moottorin välillä. Se muodostaa yhteyden myös kauko -ohjaimen vastaanottimeen. ESC saa vastaanottimelta `` komennot '' (PWM -signaali), joka (Duty Cycle) kertoo sille, kuinka paljon kaukosäätimen kaasua painetaan. Se ohjaa sitten akusta moottoriin kulkevan energian määrää ja siten moottorin nopeutta.
Yksi käyttämäni on mitoitettu 24 voltille ja 120 ampeerille, joten jos teet matematiikkaa eli teho = jännite * virta, 24 * 120 = 2880 wattia ja moottorin nimellisteho on 2500 wattia, joten meillä on tässä hieman tilaa.
Huomautus: ESC on yksi osa sähköistä rullalautarakettasi, josta et halua halpaa. Halvempi nopeudensäädin voi syttyä palamaan. Voit myös halutessasi käyttää VESC: tä, joka on ESC -versio.
Vaihe 3: Akun rakentaminen




Akku määrittää, kuinka pitkälle voit mennä. Haluat akun, joka on yhteensopiva moottorisi kanssa. Rakennettu akku on 6S 3P 18650 Li-ion, mikä tarkoittaa, että minulla on 6 Li-ion-kennoa sarjassa ja 3 rinnakkain. Tämä tarkoittaa, että akun jännite on 25,2 volttia (6 x 4,2).
Akun kapasiteetti mitataan mAh: ssa ja se määrää akun mehun määrän. Minulla on 7 800 mAh, ja tämän avulla voit määrittää, kuinka paljon energiaa sinulla on wattituntina.
En mene paljon yksityiskohtiin akun rakentamisesta, koska minulla on jo Instructables -viesti, jonka voit tarkistaa!
Lisäksi voit käyttää myös Li-Po 6S -akkua, joten sinun ei tarvitse huolehtia sen rakentamisesta, mutta en suosittele Li-Po-kennoja, koska ne voivat olla vaarallisia, jos niitä ei käsitellä oikein.
Vaihe 4: Hihnapyörä ja moottorikiinnike



Hihnapyörä ja hihna: Joten pyörien, moottoripyörän, pyörän hihnapyörän ja hihnan on sovittava yhteen voimansiirtoon. Pyörän hihnapyörän suhdetta moottorin hihnapyörään kutsutaan "vaihteenvähennyssuhteeksi". Haluat sen olevan noin 2,5, mutta se voi laskea jopa 1,5 tai korkeintaan 3. Yleensä pienempi pienennyssuhde on parempi, mutta hidas. Käytin 70 mm: n pyörän hihnapyörää, joka tulee pakkaukseen, jonka välityssuhde on 3 suurille nopeuksille.
Moottorikiinnike: Rakennetulleni päätin tehdä oman moottorikiinnityksen, koska tilaamani oli erittäin hauras ja hyödytön.
Suunnittelussa käytin Autodesk Fusion 360 -laitetta ja suunnittelussa päätin käyttää kiinnitystekniikkaa sen kiinnittämiseksi longboard -kuorma -autoihin. Tein lopullisen versioni, ja testien ja 3D -tulostuksen avulla tajusin, kuinka paljon liukua voisin saada moottorin ja kuorma -auton akselin väliin hihnan kiristämiseksi tulevaisuudessa.
Kun malli oli valmis, vein sen läheiseen CNC -työpajaan ja sain sen valmistettuksi CNC: llä. Se on vähentävä valmistusprosessi, jossa käytetään tietokonepohjaisia säätimiä ja työstökoneita materiaalikerrosten poistamiseksi työkappaleesta ja valmistetaan räätälöity osa. Materiaalina käytin alumiinia 6061-T6, koska sitä on helppo käsitellä ja sen lujuusominaisuudet ovat korkeat.
Voit ladata STEP- tai STL -tiedoston, jos pidät suunnittelustani alla.
Vaihe 5: Vetojärjestelmän rakennettu prosessi



Aloitin ensin poistamalla oikean takapyörän, jotta voimme kiinnittää telineen ja moottorin. Koska kuorma -autojen rullalaudassa oli lievä kaarevuus, pääsin eroon siitä metalliviilalla niin, että moottorikiinnike sopii täydellisesti rullalaudan tukiin. Moottorikiinnityksen asentamisen jälkeen asensin moottorin koneruuvien avulla.
Kun tämä oli tehty, oli aika lisätä hihnapyörä pyöräämme, jotta voimme siirtää pyörimisenergian moottorista pyörään. Se on todella yksinkertainen prosessi vain asettamalla isompi hihnapyörä täsmälleen pyörän keskelle ja merkitsemään reiät, joihin meidän on porattava pyörän läpi. Kiinnitä hihnapyörä porauksen jälkeen joillekin koneen ruuveille, älä unohda käyttää kierrelukitusta tai itselukittuvaa mutteria koneruuvien kanssa.
Kiinnitä nyt pienempi hihnapyörä moottorin akselille ja laita hihna pyörän mukana ja varmista, että se on oikein kohdistettu siten, että kaikki kolme yhdessä muodostavat voimansiirron.
Vaihe 6: Elektroniikka ja 3D -tulostus



Voimansiirron päätyttyä voimme kiinnittää ESC: n moottoriin. Liitä vain kolme johtoa ESC: stä moottorin kolmeen johtoon, kytke nyt akku ESC: hen ja lopulta on aika liittää ESC radiovastaanottimeen.
Päätin rakentaa oman radio -ohjaimen Arduinon ja nRF24L01 -moduulin avulla, mutta voit ostaa vain yhden käyttää sitä., Rakentamiseen tarvitset
- Arduino Nano x2
- nRF24L01 -moduuli x2
- Joystick -moduuli x1
- 500mAh 1S Li-Po -akku x1
- TP4056 -moduuli x1
- Kytkin x1
- Boost -moduuli
- 3D -tulostettu kotelo (Lataa STL alta)
Kytke vain lähetin ja vastaanotin tässä vaiheessa annetun piirin mukaisesti ja lataa koodi (lataa alta) molempiin Arduinoon sen jälkeen, kun liität vastaanottimen Arduinon 5V, GND ja Digital Pin 5 ESC: n 5V, GND ja Signal PIN.
Kun olet kiinnittänyt vastaanottimen testin, pyöriikö moottori oikeaan suuntaan, jos ei, vaihda vain kaksi johtoa moottorista ESC: hen ja moottori pyörii toiseen suuntaan. Nyt sinun tarvitsee vain lisätä kaikki elektroniikka ja paristot koteloon, jossa minulla on 3D -tulostin (lataa alta), joten tein mukautetun kotelon, mutta voit käyttää joitain muovilaatikoita ja asentaa sen longboardin alle. valmis rullaamaan kaduilla!
Vaihe 7: Teit sen

Teit sen. Rakensit juuri oman sähköisen longboardin. Muista jakaa kuvasi kanssani sosiaalisessa mediassa.
Hyvä on! Nyt numerot!
Paino: 7,2 kg
Välys: 7,5 cm
Huippunopeus: 40 km/h (mahdollista saavuttaa 48 km/h, mutta erittäin epävakaa ajaa)
Matkanopeus: 25 km/h
Alue: 18 kilometriä
Paristot: 6S 3P Li-ion (25.2V 7800mAh)
Joten tämä on melkein tämä opetusohjelman kaverit. Jos pidät työstäni, harkitse YouTube -kanavani upeita juttuja:
Voit myös seurata minua Facebookissa, Twitterissä jne. Tulevissa projekteissa
www.facebook.com/NematicsLab/
www.instagram.com/NematicsLab/
twitter.com/NematicsLab
Suositeltava:
DIY 3D -LED -kuutio Vadelma Pi: 6 askelta (kuvilla)
")
DIY 3D -LED -kuutio Raspberry Pi: llä: Tässä projektissa käydään läpi, miten teimme DIY 3D -LED -kuution ws2812b -LED -valoista. Kuutio on 8x8x8 LEDiä, joten yhteensä 512, ja kerrokset on valmistettu akryylilevyistä, jotka saimme kotoa. Animaatiot saavat virtansa vadelmasta pi ja 5V virtalähteestä. Th
DIY MIST/FOG MAKER IC 555: 6 askelta (kuvilla)
")
DIY MIST/FOG MAKER KÄYTTÄMÄLLÄ IC 555: Tässä opetusohjelmassa näytän kuinka rakentaa sumun/sumun valmistaja IC 555: n erittäin yksinkertaisella piirillä. Tämä tunnetaan myös kostuttimena, sumuttimen avulla pääset alkuun
DIY WiFi Smart Security Light Shelly 1: 6 askelta (kuvilla)
")
DIY WiFi Smart Security Light Shelly 1: Tässä ohjeessa tarkastellaan DIY -älyvalon luomista Shellyn Shelly 1 -älyreleen avulla. Kun teet turvavalosta älykkään, voit hallita paljon paremmin, milloin se aktivoituu ja kuinka kauan se pysyy päällä. Se voi olla toimiva
DIY matalajännitteinen ulkovalaistus, jota ohjataan Raspberry Pi: 11 askelta (kuvilla)
")
DIY matalajännitteinen ulkovalaistus, jota ohjataan Raspberry Pi: llä: Miksi? Minun on myönnettävä, että olen monien muiden tavoin suuri esineiden internetin (tai IoT) fani. Olen myös edelleen väsynyt kytkemään kaikki valot, laitteet, etuovet, autotallin ovet ja kuka tietää mitä muuta altistuneeseen internetiin. Varsinkin sellaisten tapahtumien kanssa kuin
ECOtravel - Electric Longboard: 8 vaihetta

ECOtravel - Electric Longboard: Olemme ECOtravel -tiimi, johon kuuluu 5 sähkömekaanisen tekniikan opiskelijaa. Me kaikki opiskelemme HELHa -lukiossa, joka sijaitsee Monsissa Belgiassa ja olemme kaikki tietoisia siitä, että on aika ajatella jalanjälkeämme. Päätimme miettiä tapaa