
Sisällysluettelo:
- Kirjoittaja John Day day@howwhatproduce.com.
- Public 2024-01-30 09:00.
- Viimeksi muokattu 2025-01-23 14:41.

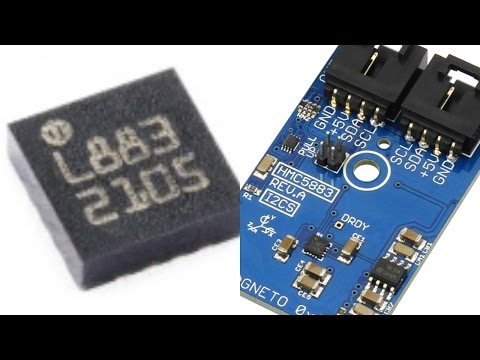
HMC5883 on digitaalinen kompassi, joka on suunniteltu matalan kentän magneettitunnistukseen. Tällä laitteella on laaja magneettikenttäalue +/- 8 Oe ja lähtötaajuus 160 Hz. HMC5883-anturissa on automaattiset degaussing-hihnaohjaimet, offset-peruutus ja 12-bittinen ADC, joka mahdollistaa kompassin suunnan 1 °-2 ° tarkkuuden. Kaikki I²C -minimoduulit on suunniteltu toimimaan 5 VDC: n jännitteellä.
Tässä opetusohjelmassa aiomme selittää HMC5883: n yksityiskohtaisen työskentelyn Arduino nanon kanssa.
Vaihe 1: Tarvittava laitteisto:



Tavoitteemme saavuttamiseen tarvittavat materiaalit sisältävät seuraavat laitteistokomponentit:
1. HMC5883
2. Arduino Nano
3. I2C -kaapeli
4. I2C -kilpi Arduino Nanolle
Vaihe 2: Laitteiston kytkentä:


Laitteiston kytkentäosio selittää periaatteessa anturin ja arduino nanon väliset tarvittavat johdot. Oikeiden liitosten varmistaminen on perustarve, kun työskentelet minkä tahansa järjestelmän kanssa halutun lähdön saavuttamiseksi. Tarvittavat liitännät ovat siis seuraavat:
HMC5883 toimii I2C: n yli. Tässä on esimerkki kytkentäkaaviosta, joka osoittaa, miten anturin jokainen liitäntä kytketään.
Valmis levy on konfiguroitu I2C-rajapintaa varten, joten suosittelemme käyttämään tätä kytkentää, jos olet muuten agnostikko. Tarvitset vain neljä johtoa!
Tarvitaan vain neljä liitäntää Vcc, Gnd, SCL ja SDA, ja ne on kytketty I2C -kaapelin avulla.
Nämä yhteydet on esitetty yllä olevissa kuvissa.
Vaihe 3: Arduino -koodi magneettikentän voimakkuuden mittaamiseksi:


Aloitetaan nyt Arduino -koodilla.
Kun käytät anturimoduulia Arduinon kanssa, sisällytämme Wire.h -kirjaston. "Wire" -kirjasto sisältää toiminnot, jotka helpottavat i2c -tiedonsiirtoa anturin ja Arduino -kortin välillä.
Koko Arduino -koodi on alla käyttäjän mukavuuden vuoksi:
#sisältää
// HMC5883 I2C -osoite on 0x1E (30)
#define Addr 0x1E
mitätön asennus ()
{
// Alusta I2C -viestintä MASTERiksi
Wire.begin ();
// Alusta sarjaliikenne, aseta baudinopeus = 9600
Sarja.alku (9600);
// Käynnistä I2C -lähetys
Wire.beginTransmission (Addr);
// Valitse configure register A
Wire.write (0x00);
// Aseta normaali mittauskonfiguraatio, tiedonsiirtonopeus = 0,75 Hz
Wire.write (0x60);
// Pysäytä I2C -lähetys
Wire.endTransmission ();
// Käynnistä I2C -lähetys
Wire.beginTransmission (Addr);
// Valitse tilarekisteri
Wire.write (0x02);
// Aseta jatkuva mittaus
Wire.write (0x00);
// Pysäytä I2C -lähetys
Wire.endTransmission ();
viive (300);
}
tyhjä silmukka ()
{
allekirjoittamattomat int -tiedot [6];
// Käynnistä I2C -lähetys
Wire.beginTransmission (Addr);
// Valitse tietorekisteri
Wire.write (0x03);
// Pysäytä I2C -lähetys
Wire.endTransmission ();
// Pyydä 6 tavua dataa
Wire.requestFrom (Addr, 6);
// Lue 6 tavua dataa
// xMag msb, xMag lsb, zMag msb, zMag lsb, yMag msb, yMag lsb
jos (Wire.available () == 6)
{
data [0] = Wire.read ();
data [1] = Wire.read ();
data [2] = Wire.read ();
data [3] = Wire.read ();
data [4] = Wire.read ();
data [5] = Wire.read ();
}
viive (300);
// Muunna tiedot
int xMag = ((data [0] * 256) + data [1]);
int zMag = ((data [2] * 256) + data [3]);
int yMag = ((data [4] * 256) + data [5]);
// Tulostustiedot sarjamittarille
Serial.print ("Magneettikenttä X-akselilla:");
Sarja.println (xMag);
Serial.print ("Magneettikenttä Y-akselilla:");
Sarja.println (yMag);
Serial.print ("Z-akselin magneettikenttä:");
Sarja.println (zMag);
viive (300);
}
Johdinkirjastossa Wire.write () ja Wire.read () käytetään komentojen kirjoittamiseen ja anturilähdön lukemiseen. Koodin seuraava osa kuvaa anturin lähdön lukemista.
// Lue 6 tavua dataa // xMag msb, xMag lsb, zMag msb, zMag lsb, yMag msb, yMag lsb if (Wire.available () == 6) {data [0] = Wire.read (); data [1] = Wire.read (); data [2] = Wire.read (); data [3] = Wire.read (); data [4] = Wire.read (); data [5] = Wire.read (); }
Serial.print () ja Serial.println () käytetään anturin lähdön näyttämiseen Arduino IDE: n sarjamonitorissa.
Anturin lähtö näkyy yllä olevassa kuvassa.
Vaihe 4: Sovellukset:

HMC5883 on pinta-asennettava monisirumoduuli, joka on suunniteltu matalan kentän magneettitunnistukseen ja jossa on digitaalinen käyttöliittymä sovelluksiin, kuten edulliseen kompassointiin ja magnetometriaan. Sen yhden tai kahden asteen korkea tarkkuus mahdollistaa jalankulkijoiden navigoinnin ja LBS -sovellukset.
Suositeltava:
Magneettikentän mittaus käyttäen HMC5883 ja Raspberry Pi: 4 vaihetta

Magneettikentän mittaus HMC5883: n ja Raspberry Pi: n avulla: HMC5883 on digitaalinen kompassi, joka on suunniteltu matalan kentän magneettitunnistukseen. Tällä laitteella on laaja magneettikenttäalue +/- 8 Oe ja lähtötaajuus 160 Hz. HMC5883 -anturi sisältää automaattiset hihnaohjaimet, offset -peruutus ja
Magneettikentän mittaus käyttäen HMC5883 ja hiukkasfotonia: 4 vaihetta

Magneettikentän mittaus HMC5883: n ja hiukkasfotonin avulla: HMC5883 on digitaalinen kompassi, joka on suunniteltu matalan kentän magneettitunnistukseen. Tällä laitteella on laaja magneettikenttäalue +/- 8 Oe ja lähtötaajuus 160 Hz. HMC5883 -anturi sisältää automaattiset hihnaohjaimet, offset -peruutus ja
Kiihtyvyyden mittaus käyttäen ADXL345 ja Raspberry Pi: 4 vaihetta

Kiihtyvyyden mittaus ADXL345: n ja Raspberry Pi: n avulla: ADXL345 on pieni, ohut, erittäin pienitehoinen, 3-akselinen kiihtyvyysanturi, jonka tarkkuus (13-bittinen) mitataan jopa ± 16 g. Digitaalinen lähtötieto on muotoiltu 16-bittiseksi kaksoiskappaleeksi, ja se on saatavana digitaalisen I2 C-liitännän kautta. Se mittaa
Kiihtyvyyden mittaus käyttäen H3LIS331DL ja Raspberry Pi: 4 vaihetta

Kiihtyvyyden mittaus H3LIS331DL: n ja Raspberry Pi: n avulla: H3LIS331DL on pienitehoinen ja suorituskykyinen 3-akselinen lineaarinen kiihtyvyysanturi, joka kuuluu nano-perheeseen, ja jossa on digitaalinen I²C-sarjaliitäntä. H3LIS331DL: ssä on käyttäjän valittavissa täydet asteikot ± 100 g/± 200 g/± 400 g, ja se pystyy mittaamaan kiihtyvyydet
Kiihtyvyyden mittaus käyttäen ADXL345 ja Arduino Nano: 4 vaihetta

Kiihtyvyyden mittaus ADXL345: n ja Arduino Nanon avulla: ADXL345 on pieni, ohut, erittäin pienitehoinen 3-akselinen kiihtyvyysanturi, jolla on suuri resoluutio (13-bittinen) mittaus jopa ± 16 g. Digitaalinen lähtötieto on muotoiltu 16-bittiseksi kaksoiskappaleeksi, ja se on saatavana digitaalisen I2 C-liitännän kautta. Se mittaa