: 8 vaihetta (kuvilla)")
Sisällysluettelo:
- Vaihe 1: Hankkeen materiaalit
- Vaihe 2: Osa 1: Liner Motionin luominen Writerille
- Vaihe 3: Osa 2: Kirjoittimen pää (liike ylös ja alas)
- Vaihe 4: Osa 3: Paperirulla
- Vaihe 5: Osa 4: Bluetooth -moduulin integrointi
- Vaihe 6: Osa 5: Kokoa kaikki
- Vaihe 7: Tee piiristä kompakti
- Vaihe 8: Tulosta pistekirjoitus
- Kirjoittaja John Day day@howwhatproduce.com.
- Public 2024-01-30 09:03.
- Viimeksi muokattu 2025-01-23 14:44.


Hei kaikki, Kaikki tämä alkoi yksinkertaisen XY -piirturin tekemisestä sen onnistuneen suorittamisen jälkeen, ajattelin kehittää yksinkertaisen puhe -pistekirjoitusmuuntimen. Aloin etsiä sitä verkossa ja odottamatta hinnat olivat liian korkeat, mikä sai minut rakentamaan pienen kannettavan ja halvan kirjoittimen.
Tiedämme, että mitä tahansa ajattelemme rakentavamme, sitä voi olla olemassa tai ainakin joku yrittää, joten aloin etsiä tällaista kirjoituskonetta. Sain videon, jossa se oli melko iso ja meluisa, joten ajattelin laittaa oman maun joka on pieni kannettava ja helppokäyttöinen.
Rehellisesti sanottuna olen uusi Arduinossa ja vielä opettelen sitä. Olen onnistuneesti pystynyt rakentamaan XY -piirturin niin, että toiveeni olivat korkealla samalla tietämyksellä, että voin vetää oman pienen pistekirjoituskirjoitukseni. paljon ja vihdoin pystyin kehittämään sen vain 2 viikossa.
Joten tässä kerrotaan, kuinka rakentaa yksinkertainen pistekirjoitus.
Vaihe 1: Hankkeen materiaalit
- Arduino Nano
- A4988 Stepper -kuljettaja
- Bluetooth -sarjalähetin -vastaanotinmoduuli
- CD -askeleen askelmoottorin liukusäädin lineaarinen ohjain mikro
- 2-osainen 360 asteen pyörivä servomoottori
- 1 kpl 180 asteen servomoottori
- 2 kpl injektioruisku (lääkekaupassa)
- 1 pala kirkasta akryylilevyä
- Kaksipuolinen vaahtoteippi
- Fevi Kwik
- Uros-naarasliitin
- Leikkaustyökalut ja ruuvimeisselisarja.
- Geeli / kuulakynä
- Matkapuhelin Bluetooth -ominaisuudella
- APP: Arduino -ääniohjaus
Rakennetaan nyt se
-
Koko projekti voidaan jakaa 4 pieneen osaan
- Liner -moduulin asennus (käyttäen A4988 -ohjainta)
- Ylös- ja alasliikkeiden luominen kirjoittajan päälle
- Tela paperin rullaamiseen
- Bluetooth -integrointi
- Lopuksi on koottava kaikki osat, jotka johtavat projektin loppuun saattamiseen.
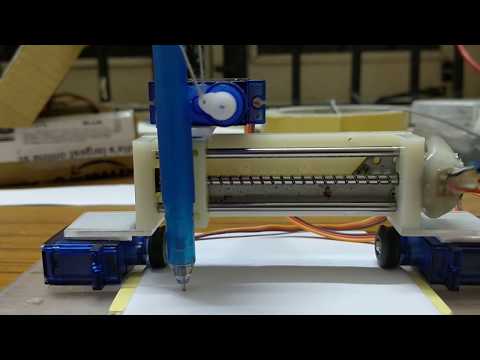
Vaihe 2: Osa 1: Liner Motionin luominen Writerille

Meidän on edettävä edestakaisin kirjoittaaksesi asiat paperille. Siellä on paljon videoita tällaisen mekaanisen liikkeen luomiseksi eri menetelmillä. Mutta käyttämällä askelmoottoria voimme tehdä sen erittäin helposti suurella tarkkuudella.
Joten välttääkseni mekaanisten tavaroiden luomista käytin askelmoottoria, joka tulee liukusäätimen kanssa, voit rakentaa sen itse, jos olet kiinnostunut rakentamaan oman, voit seurata tätä linkkiä.
Kun mekaaninen osa on tehty, meidän on suoritettava sähkökonfiguroinnin vaiheet
- Noudata piirin kokoonpanon kuvaa.
- Muista laittaa
- Nasta 6: Ota käyttöön
- Nasta 5: Vaihe
- Nasta 4: Suunta
- Lataa basicMove2 -koodi Arduino nano -laitteeseesi ja avaa sarjamonitori ja käytä "f" edelleenlähetykseen ja "" b "taaksepäin ja testaa piirisi. Tarkista pystytkö saavuttamaan oikean lineaarisen liikkeen vai et.
- Voit käyttää myös sarjan fbfbffbbfffbbbb komentoja.
Vaihe 3: Osa 2: Kirjoittimen pää (liike ylös ja alas)
")
")
")
")
On olemassa erilaisia tapoja tehdä ylös ja alas -liikkeitä. Voit tehdä sen käyttämällä solenoiditoimilaitetta. Mutta tässä käytän siihen yksinkertaista kynää servomoottorin avulla.
- Ota yksinkertainen kuulakynä, jossa on irrotettava täyttö.
- Luo reikä yläosaan sen jälkeen, kun olet painanut täyttömateriaalin sisään, varmista, että reiän tulee mennä kynän molemmin puolin ja täyttää se.
- Tee täyttöaukkoon toinen reikä ja kiinnitä siihen naru.
- Laita täyttölaite takaisin ja luo reikä kynään täyttöaukon alapuolelle.
- Sido nyt joustava kumi päälle kynän läpi ja kierrä.
- Käytä 180 asteen servomoottoria ja aseta se 0 asteeseen ja kiinnitä naru nobiin.
- Nyt kun nob pyörii 180 vastapäivään, täyttötulppa vedetään ulos ja kun se siirtyy takaisin 0 asteeseen yläosassa olevan joustavan nauhan takia, se siirtyy takaisin sisään.
- Kiinnitä signaalitappi Arduino nanon nastaan 8.
- Lataa basicMove2 -koodi Arduino nano -laitteeseesi ja avaa sarjamonitori ja käytä "n" ja testaa piiriäsi.
- Voit käyttää myös sarjan nnnnnnnnn -komentoja ja tarkistaa, toimiiko se vai ei.
- Lisää haluttua kiertokulmaa saadaksesi halu -liikkeen.
Vaihe 4: Osa 3: Paperirulla



Nyt paperirulla, se on mielenkiintoisin ja haastavin osa.
- Poista injektioruiskun kumi.
- Leikkaa muovivaihteet ympyrään.
- Laita se kumiin ja levitä liimaa.
- Kiinnitä servo ja kiinnitä se liimalla.
- Luo toinen, kuten yllä.
- Kiinnitä signaalitappi Arduino nanon nastoihin 9 ja 10.
- Lataa basicMove2 -koodi Arduino nano -laitteeseesi ja avaa sarjamonitori ja käytä "p" ja testaa piiriäsi.
- Voit käyttää myös sarjan pppppppppp komentoja ja tarkistaa, toimiiko se vai ei.
- Lisää haluttua kiertonopeutta saadaksesi halutun nopeuden.
- Yritä säätää nopeutta muuttamalla servon sisällä olevaa potentiometriä.
- Pyöritä samaan suuntaan ja nopeuteen (tämä on tärkein ja työläs työ).
Vaihe 5: Osa 4: Bluetooth -moduulin integrointi

Tämä osa on helpoin osa.
- Tee yllä oleva piirikonfiguraatio ja se on tehty.
- Se auttaa sinua lähettämään äänikomentoja Arduinon ääniohjauksella.
- Voit etsiä googlella hakusanalla "Arduino Bluetooth-moduuli hc-05".
Vaihe 6: Osa 5: Kokoa kaikki



Kootaan nyt kaikki neljä osaa.
- Puhdista arkki.
- Lisää kaksoisteipillä servomoottori kuvan mukaisesti.
- Kiinnitä ylimääräinen muovikappale lineaariseen liukusäätimeen ja aseta se kahden servon päälle.
- Varmista, että asetat sen paperirullan suuntaisesti.
- Kiinnitä nyt kynän pää, varmista, että se ei kosketa pintaa, ja servokierrossa sen pitäisi rei'ittää teippi.
- Kiinnitä tappi Arduino nano.
- Lataa basicMove2 -koodi Arduino nano -laitteeseesi.
-
Avaa sarjamonitori ja tarkista kaikki komennot
- f edelleenlähetystä varten
- b takaisin
- p paperin rullaamiseen
- n kynän siirtämiseen ylös ja alas.
- Kun kaikki toiminnot on nyt varmistettu, se on valmis tulostamaan pistekirjoituksella.
Vaihe 7: Tee piiristä kompakti




Suorita kuva pienen ja yhden leipälevyn luomiseksi.
Vaihe 8: Tulosta pistekirjoitus

- Avaa Brallie.ino -tiedosto, avaa Arduino IDE -sarjan näyttö.
- Aseta paperi vierintäpaperimoottorin alle.
- Lähetä komennolle tilaa (esim. "") Ja napsauta Enter.
- Paperi liukuu sisään.
- Tee sitä, kunnes se ylittää kirjoittajan pään.
- Sitten voit lähettää komennon näytössä, varsinaisen tekstin.
- Avaa Bluetooth -sovellus ja muodosta yhteys Bluetoothiin ja lähetä äänikomento.
- käännä paperi nähdäksesi pistekirjoituskielen.
- Yritin muutamia sanoja, kuten hei, hei ja tervetuloa, näet tulostuspaperinäytteen.
-
Voit muuttaa koodin alla olevia parametreja saadaksesi juuri sinulle sopivat tulokset.
- Aukko pistekirjoitussarakkeiden välillä: int askeleet = 30;
- Viiva kahden pisteen pistekirjoituksen ja kahden seuraavan pisteen rivien välillä: int paperLine = 250;
- Lineaarisen liukusäätimen nopeus: int stepperDelay = 500;
- Kirjoittimen pään nopeus: int servodelay = 500;
- Merkkimäärä rivillä: int n = 10;
Suositeltava:
Yksinkertainen Light-Up Ruma joulupusero: 9 vaihetta (kuvilla)
")
Yksinkertainen Light-Up Ruma joulupusero: Se tapahtuu joka vuosi … Tarvitset " ruma joulupusero " ja unohdit suunnitella etukäteen. No, tänä vuonna olet onnekas! Viivästyminen ei ole sinun kaatumisesi. Näytämme sinulle, kuinka tehdä yksinkertainen Light-Up Ruma joulupusero
Yksinkertainen jalusta akustiselle Levitator MiniLeville: 12 vaihetta (kuvilla)
")
Yksinkertainen jalusta akustiselle Levitator MiniLeville: Tämä projekti ei olisi mahdollista tohtori Asier Marzon luoman hämmästyttävän projektin kanssa. https://www.instructables.com/Acoustic-Levitator/Kuten kaikki hyvät projektit, tämäkin alkoi yksinkertaisesti ja kasvoi ajan myötä. Tohtori Marzo intractan lukemisen jälkeen
Yksinkertainen ja edullinen juustolaite: 6 vaihetta (kuvilla)
")
Yksinkertainen ja edullinen juustopuristin: Juustovalmistus on hämmästyttävä alkemia, joka muuttaa maidon erilaisiin tekstuureihin ja makuihin. Sisäänkäynti minulle oli ricotta, helppo ja anteeksiantava juusto, jota ei tarvita hienoja laitteita tai tarvikkeita. Mozzarella tuli seuraavaksi
DIY Yksinkertainen kuulokeliitäntä hienovaraisella valaistuksella: 19 vaihetta (kuvilla)
")
DIY Yksinkertainen kuuloketeline hienovaraisella valaistuksella: Tässä ohjeessa näytän sinulle, kuinka tehdä yksinkertaisia ja pienikokoisia kuulokeliitäntöjä, joissa on hienovarainen valaistus, käyttämällä halpoja materiaaleja ja perustyökaluja. Kiinnikkeet Juotin
Yksinkertainen 3D -tulostettu robotti: 11 vaihetta (kuvilla)
")
Yksinkertainen 3D -tulostettu robotti: Anna minun seurustella itseni kanssa. Kasvoin pystysarjoilla ja sitten LEGOlla. Myöhemmin elämässä käytin 8020: a rakentaakseni prototyyppityyppisiä järjestelmiä. Yleensä talon ympärillä oli romuja, joita lapseni käyttivät versionaan pystytyssarjasta